Lab 6 - Algorytmy poszukiwania ścieżki próbkujące przestrzeń poszukiwań na przykładzie RRT (Rapidly-exploring Random Tree)

![]()
Metody i algorytmy planowania ruchu - laboratorium
Lab 6 - Algorytmy poszukiwania ścieżki próbkujące przestrzeń poszukiwań na przykładzie RRT (Rapidly-exploring Random Tree)

1. Wprowadzenie
Celem zajęć jest zapoznanie się z jednym z podstawowych algorytmów poszukiwania ścieżki łączącej 2 punkty, który wykorzystuje losowe próbkowanie przestrzeni poszukiwań.
Tym razem nie będziemy przeszukiwać już danego grafu, lecz tworzyć własny graf przeszukiwań, który nie będzie aż tak ograniczony jak grafy-siatki wykorzystywane na poprzednich zajęciach.
Tego typu metody są szczególnie przydatne, gdy przestrzeń poszukiwań jest bardzo duża, gdyż nie wymagają one operacji na bardzo dużych grafach.
⚠️ Pamiętaj, aby w każdym nowym terminalu zanim rozpoczniesz pracę skonfigurować środowisko ROS komendą
source /opt/ros/humble/setup.bashlubsource install/setup.bash
2. Przygotowanie paczki w ROS
Zainstaluj paczkę ros-humble-nav2-map-server:
sudo apt-get install ros-humble-nav2-map-server ros-humble-nav2-lifecycle-managerPobierz paczkę z zadaniami z repozytorium github:
cd ~/ros2_ws/src
git clone https://github.com/BartlomiejKulecki/mapr_6_student.gitNastępnie skompiluj pobraną paczkę i odśwież przestrzeń roboczą:
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bashPliki points.py oraz grid_map.py są podobne do tych, które mieliście do dyspozycji na poprzednich zajęciach, aczkolwiek zostały one dopasowane do nowej sytuacji, gdy mapa będzie nam służyła jedynie do sprawdzania poprawności ścieżek, a nie będzie przestrzenią poszukiwania jako taką (nie będzie stanowić grafu poszukiwań).
3. Uproszczony algorytm RRT
Uproszczony algorytm RRT należy zaimplementować w pliku rrt_vertices.py
Aby ułatwić wam zadanie, zaczniemy od implementacji funkcji które użyte razem, w odpowiedni sposób złożą się na uproszczony algorytm RRT. Jednakże, jeśli uważasz, że jesteś w stanie poradzić sobie bez tych ułatwień, po prostu od razu zaimplementuj algorytm opisany w zadaniu 3.5.
Aby ułatwić wyświetlanie drzewa przeszukiwań, została
zaimplementowana metoda publish_search, która publikuje
wizualizację drzewa przeszukiwań, przy czym zakłada ona, że drzewo to
jest reprezentowane poprzez słownik self.parent, który
zawiera krawędzie drzewa zdefiniowane jako para klucz, wartość, gdzie
klucz jest wierzchołkiem dzieckiem, a wartość jego wierzchołkiem
rodzicem.
Implementację niektórych funkcjonalności może wam ułatwić biblioteka numpy i funkcje takie jak:
np.linalg.normnp.random.randomnp.random.seednp.linspace
oraz inne działania na wektorach liczb.
🔨 Zadania:
3.1 random_point()
Napisz metodę, która zwraca losowy punkt w dwuwymiarowej przestrzeni
zadania T = [0; self.width] ⨉ [0; self.height].
3.2 find_closest(point)
Napisz metodę, która zwraca najbliższy punktowi point
wierzchołek drzewa przeszukiwania.
3.3
new_point(random_point, closest_point)
Napisz metodę, która zwróci punkt należący do odcinka łączącego
closest_point i random_point znajdujący się w
odległości self.step od closest_point.
3.4
check_if_valid(point_1, point_2)
Napisz metodę, która sprawdzi, czy odcinek łączący
point_1 i point_2 nie wychodzi poza przestrzeń
zadania T oraz czy nie jest w kolizji z przeszkodą
zaznaczoną na mapie self.map. Możesz to zrobić w sposób
przybliżony, wybierając np. 100 równoodległych od siebie punktów na tym
odcinku i sprawdzając, czy każdy z nich leży w przestrzeni wolnej.
3.5 search()
Napisz metodę, która realizuje następujący pseudokod:
- Zainicjalizuj drzewo przeszukiwań początkowym wierzchołkiem
self.start - Wylosuj punkt na mapie
- Znajdź najbliższy mu wierzchołek należący do drzewa przeszukiwań
- Utwórz nowy punkt, który leży na odcinku łączącym punkty wyznaczone
w podpunktach 2 i 3 w odległości
self.stepod punktu z podpunktu 3. - Sprawdź, czy odcinek łączący nowy punkt z najbliższym mu wierzchołkiem w grafie leży w przestrzeni wolnej.
- Jeśli tak, to dodaj ten nowy punkt do drzewa przeszukiwań.
- Wyświetl drzewo przeszukiwań poleceniem
self.publish_search() - Sprawdź, czy z nowego punktu da się bezkolizyjnie połączyć z punktem
końcowym
self.end. - Jeśli tak, to dodaj go do drzewa, wyświetl rozwiązanie (metoda
self.publish_path(path)) i zakończ algorytm. - Jeśli nie, wróć do punktu 2.
Kod uruchamia się poleceniem:
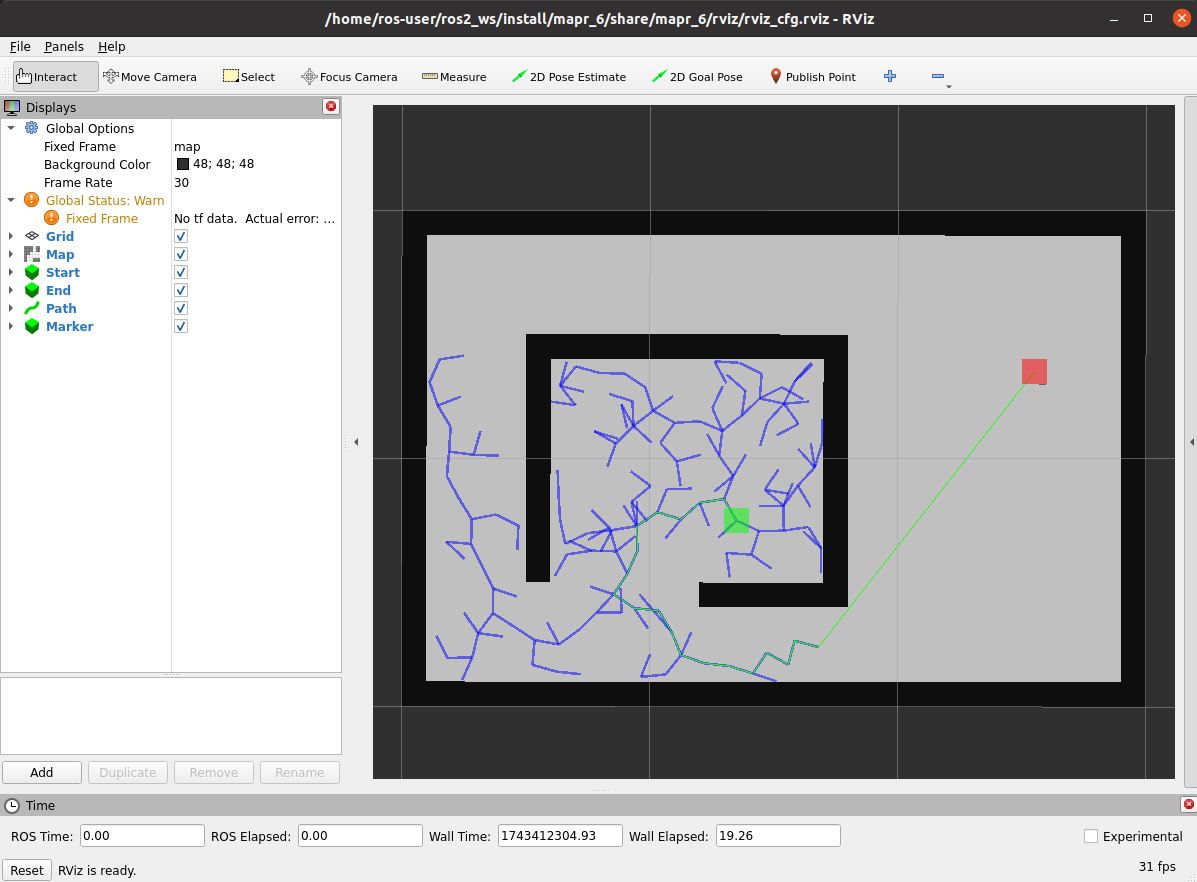
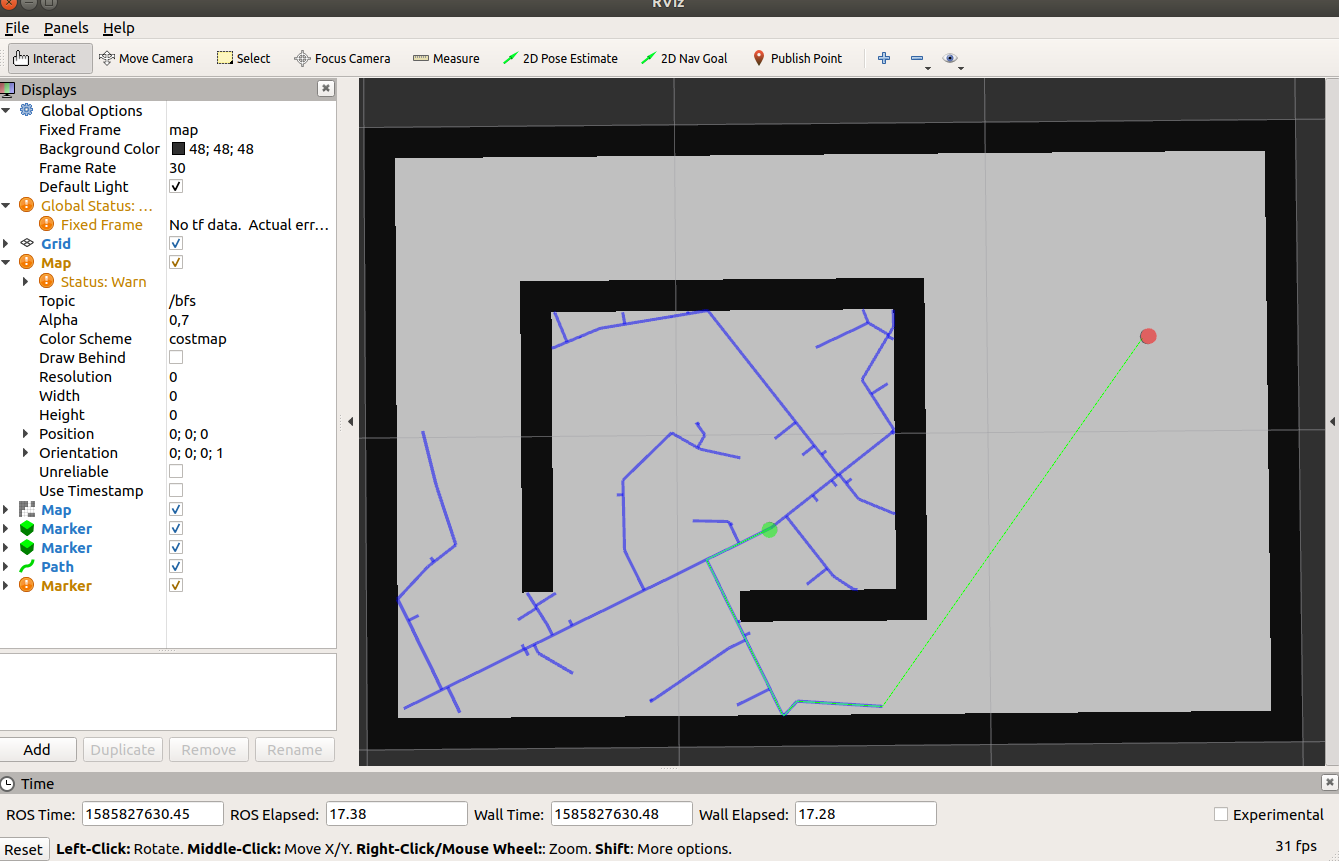
ros2 launch mapr_6_student rrt_launch.py vertices:=TrueSpodziewany efekt dla np.random.seed(44) i
self.step = 0.05:
 |
 |
|---|---|
| działanie | stan końcowy |
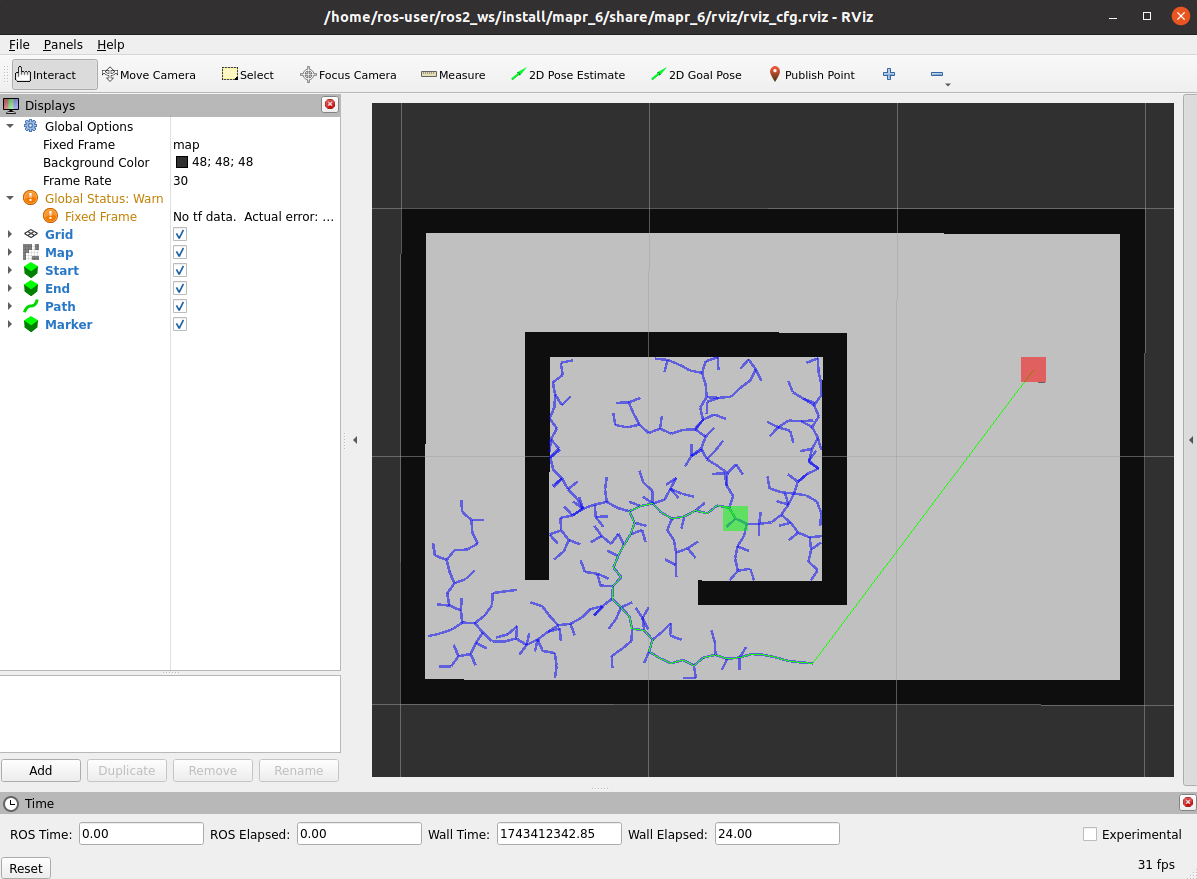
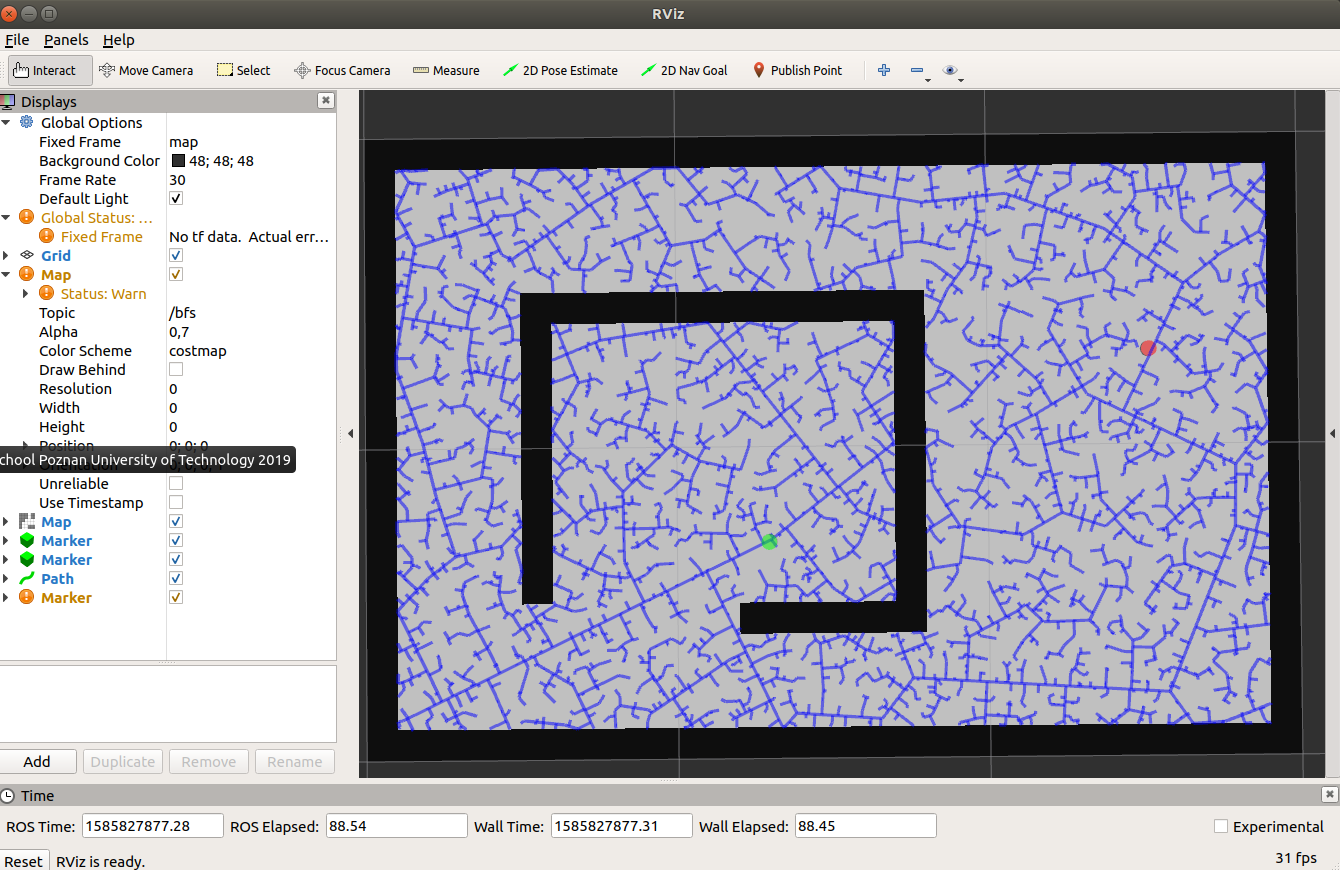
Spodziewany efekt dla np.random.seed(44) i
self.step = 0.1:
4. Algorytm RRT (zadanie dla chętnych 💪)
Algorytm RRT należy zaimplementować w pliku rrt.py
Kod uruchamia się poleceniem:
ros2 launch mapr_6_student rrt_launch.py🔨 Zadania:
4.1 find_closest(point)
Zmodyfikuj metodę tak, aby zwracała ona najbliższy punktowi
point punkt na grafie, tj. najbliższy wierzchołek, bądź
najbliższy punkt na krawędzi. Jeżeli jest to najbliższy punkt na
krawędzi, to rozdziel tę krawędź na dwie - łączącą punkt bliższy
korzeniowi i wyznaczony punkt na krawędzi, oraz ten punkt i punkt dalszy
korzeniowi (konieczne jest to dla zachowania spójności grafu).
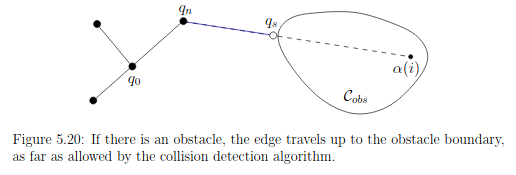
4.2
new_point(random_point, closest_point)
Zmodyfikuj metodę tak, aby zwracała ona ostatni (licząc od
closest_point do random_point) punkt należący
do odcinka łączącego closest_point i
random_point (zakładamy podział odcinka na 100
równoodległych punktów), który leży w przestrzeni wolnej (zob.
obrazek).
4.3 search()
Zmodyfikuj metodę, tak, aby realizowała algorytm opisany w punkcie 3. wykorzystując dostępne metody (w ich najnowszych wersjach).
Spodziewany efekt dla np.random.seed(444):
Warto również zakomentować część odpowiedzialną za zatrzymanie algorytmu i zobaczyć jak się będzie zachowywał w granicy dla liczby iteracji dążącej do nieskończoności np. 5000:
Oryginalny opis algorytmu RRT:
http://msl.cs.uiuc.edu/~lavalle/papers/Lav98c.pdf
http://planning.cs.uiuc.edu/booka4.pdf